UMR student finds personal connection to research
Posted by news
Sometimes you pick your research. Sometimes your research picks you.
That’s what Randall “Chip” Bilbrey of Papillion, Neb., a senior in computer engineering at the University of Missouri-Rolla, discovered when he was selected for an eight-week summer engineering program at UMR. Paired with two other students, Bilbrey spent the summer designing and building an artificial hand that uses human nerve impulses to trigger a motorized component in the prosthesis to move the hand. But it’s not just a random project for Bilbrey.
“I lost my hand in complications from a car wreck last November,” Bilbrey says. “A tire blew, and the driver lost control of the vehicle, which ultimately led to a collision with a rock bluff. Though my hand was relatively unscathed, my forearm was mangled up at some point, causing severe nerve and circulatory system damage. Survival of the hand was extremely unlikely, so we opted for an amputation.”
 |
| Robert Adams, an incoming freshman at UMR, holds the prosthetic gripper as Randall "Chip" Bilbrey describes the project. |
Robert Adams, who graduated from Rolla High School in May and will attend UMR this fall, and Samuel Hawkins, a student at Rose-Hulman Institute of Technology, worked with Bilbrey to create a prosthetic that could open and close. With only two months to complete the project, the team acted diligently to improve how prosthetics operate, as Bilbrey described his own prosthetic as being “unwieldy” and “not particularly useful.”
The team also aimed to add another dimension to the mechanical hand by having the device provide force feedback, which is something that isn’t readily available on the commercial market.
“We had to more or less start from scratch, and we hit more than enough complications to fill the two-month period,” Bilbrey explains. “It’s been somewhat frustrating work, but I feel we’ve learned quite a bit because of the complications.”
Bilbrey and 12 other undergraduate engineering students from across the country will finish up the program this week by presenting their creations.
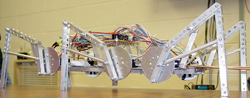 |
| The six-legged robot uses a triangle gait, keeping three legs moving at the same time. |
The Research Experience for Undergraduates program, which began June 6, is funded by the National Science Foundation and is being conducted in the Intelligent Systems Center at UMR. In its fourth year, the program provides research experiences to a small group of undergraduate students interested in micro mechatronics and smart structural systems. These students worked on open-ended, hands-on projects that drew on and integrated several domains of engineering skills in a multidisciplinary team environment. Each group received $1,000 for materials and supplies.
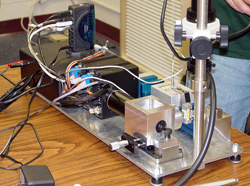 |
| The micro-testing machine can test mini-sized specimens. |
Travis Dierks of Steeleville, Ill., a senior in electrical engineering at UMR, partnered with Elliot Jenner, a student at Rochester Institute of Technology, to design, construct and program a six-legged robot capable of moving over uneven terrain. The insect-looking robot “will even detect an object it can’t get over and go around,” Dierks adds.
Scott Julien of Chesterfield, Mo., a senior in mechanical engineering, worked with Aaron Serabia, a student at South Seattle Community College, to build and calibrate a micro-testing machine to test for tensile strength and fatigue strength of mini-sized specimens.
Other projects include:
 |
| LaQuita Smith, a student at Southern Illinois University-Carbondale, describes how her group modified a car seat with a warning system to detect for incorrect installation. |
– a fail-safe car seat for infants and toddlers that will detect if it is installed in a vehicle’s front seat and is installed in the correct direction based on the child’s weight. The safest place for all children to ride is in the back seat. All infants should ride rear-facing until they have reached at least 1 year of age and weigh at least 20 pounds.
– an energy-efficient, automated blind system that includes a remote control and LCD to cater to the natural light needs of a home owner. The system includes a variety of efficiency modes as well as a manual override of automatic blind settings.
– rapid prototyping of feedback control systems for electro-mechanical and electro-hydraulic systems using an xPC TargetBox, an industrial computer system designed for rapid control prototyping applications.
 |
| Netty DeGarlais of Idaho State University and Adam Schmelzer of Duke University paired up to build a user-friendly automated solar blind system. |
The students received guidance from Dr. Keith Stanek, the Fred Finley Distinguished Professor of Electrical and Computer Engineering at UMR, and Dr. K. Krishnamurthy, professor of mechanical and aerospace engineering and associate dean of the UMR School of Engineering.
Posted by news
 Sports Headlines
Sports Headlines
- 2026 Miner Athletic Hall of Fame Induction Class Announced
- S&T Men's Basketball Earns Team Academic Excellence Awards; Five Miners Named to Honors Court
- S&T Men's Volleyball Earn AVCA Team Academic Award
- Ten Miners and Both Teams Earn USTFCCCA All-Academic; Fraser Named Scholar Athlete of the Year
- S&T Welcomes Ryan Hunt as New Assistant Track & Field Coach